

简介
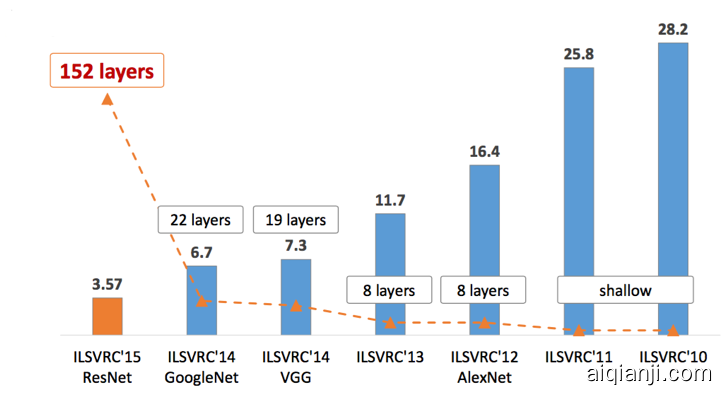
ResNet,深度残差网络,通过shortcut( skip connection )的设计,打破了深度神经网络深度的限制,使得网络深度可以多达到1001层。
它构建的152层深的神经网络,在ILSVRC2015获得在ImageNet的classification、detection、localization以及COCO的detection和segmentation上均斩获了第一名的成绩,其中classificaiton 取得3.57%的top-5错误率,
基本信息
论文 "Deep residual learning for image recognition."
paper:https://arxiv.org/pdf/1512.03385.pdf
作者 He, Kaiming, et al.
翻译:http://www.aiqianji.com/blog/article/27
创新点
1 设计残差连接:
2 使用批量正则化
网络结构
ResNet 原始结构如图
ResNet最根本的动机就是所谓的“退化”问题,即当模型的层次加深时,错误率却提高了。 但是模型的深度加深,学习能力增强,因此更深的模型不应当产生比它更浅的模型更高的错误率。
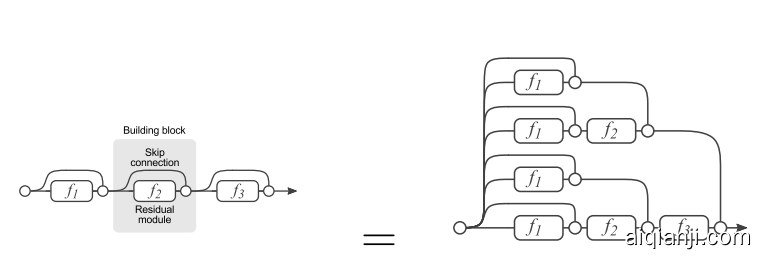
ResNet的基本模块如图,通过增加shortcut,增加一个identity mapping(恒等映射),将原始所需要学的函数H(x)转换成F(x)+x,而这两种表达的效果相同,但是优化的难度却并不相同,这一想法也是源于图像处理中的残差向量编码,通过一个reformulation,将一个问题分解成多个尺度直接的残差问题,能够很好的起到优化训练的效果。此外当模型的层数加深时,这个简单的结构能够很好的解决退化问题。
ResNet公式:
这里的l表示层,xl表示l层的输出,Hl表示一个非线性变换。所以对于ResNet而言,l层的输出是l-1层的输出加上对l-1层输出的非线性变换。



模块设计:


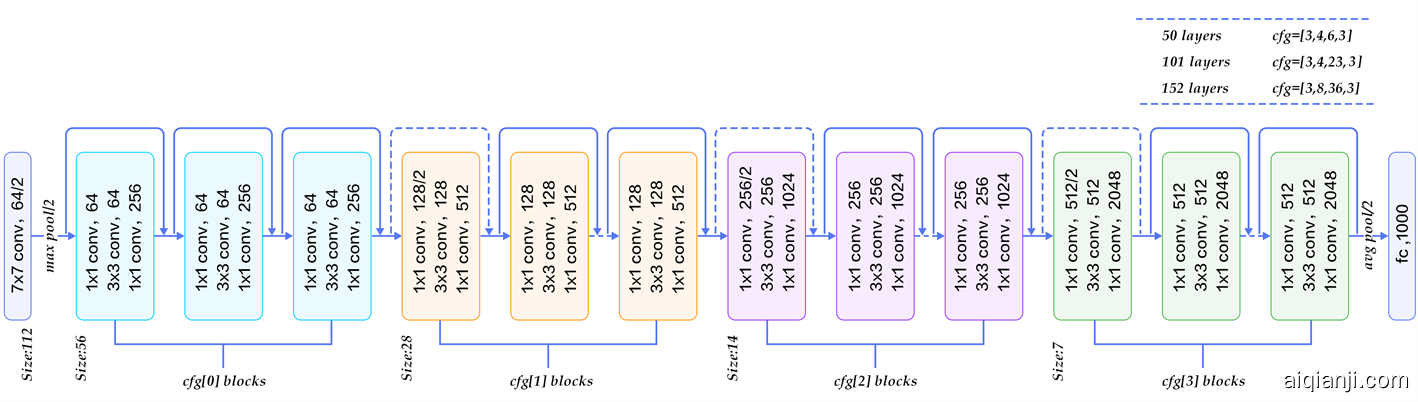
resnet网络结构对比图如图:

从图像尺寸,我们可以看到整个过程中有多次降采样。在conv3_1 conv4_1 conv5_1,都会有stride = 2 的降采样. 降采样前后的尺寸不同,因此不能直接相加,所以模块分为两种,一种是卷积模块,projection:用1×1卷积变换尺寸,来处理。另一种是indentity模块,用shortcut连接。基本结构大致相同。
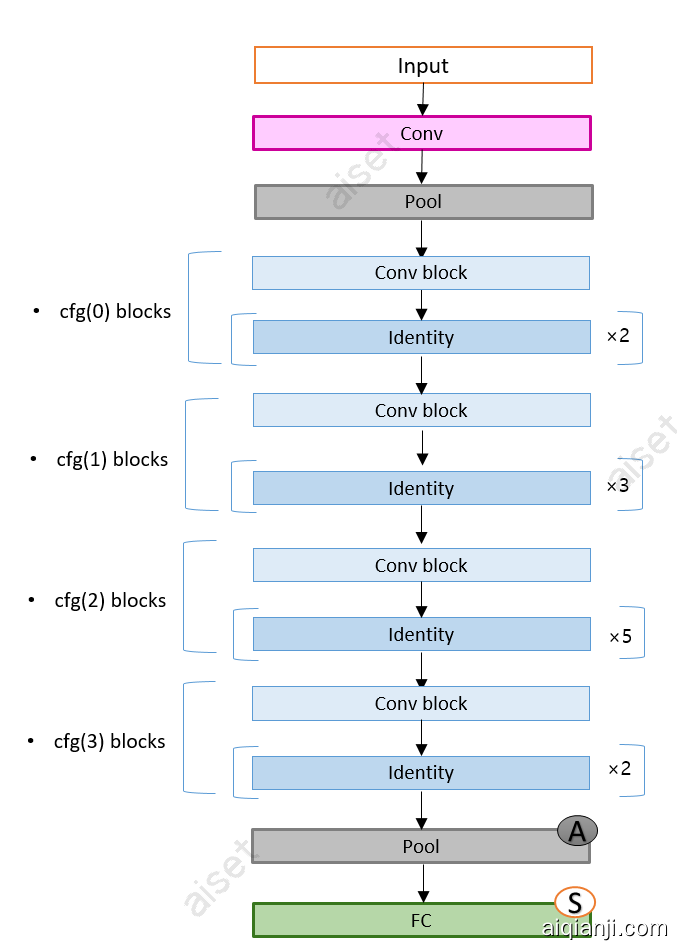
抽象如图:
源码:
tensorflow 源码 https://github.com/tensorflow/models/tree/master/research/slim/nets/resnet_v1.py
https://github.com/tensorflow/models/tree/master/research/slim/nets/resnet_v2.py
caffe https://github.com/KaimingHe/deep-residual-networks
torch https://github.com/facebook/fb.resnet.torch
pytorch https://github.com/pytorch/vision/blob/master/torchvision/models/resnet.py
练习:在32*32 的 cifar10 上进行十分类,用pytorch构建网络结构
手写示例:
class BasicBlock(nn.Module):
expansion = 1
def __init__(self, in_planes, planes, stride=1):
super(BasicBlock, self).__init__()
self.conv1 = nn.Conv2d(
in_planes, planes, kernel_size=3, stride=stride, padding=1, bias=False)
self.bn1 = nn.BatchNorm2d(planes)
self.conv2 = nn.Conv2d(planes, planes, kernel_size=3,
stride=1, padding=1, bias=False)
self.bn2 = nn.BatchNorm2d(planes)
self.shortcut = nn.Sequential()
if stride != 1 or in_planes != self.expansion*planes:
self.shortcut = nn.Sequential(
nn.Conv2d(in_planes, self.expansion*planes,
kernel_size=1, stride=stride, bias=False),
nn.BatchNorm2d(self.expansion*planes)
)
def forward(self, x):
out = F.relu(self.bn1(self.conv1(x)))
out = self.bn2(self.conv2(out))
out += self.shortcut(x)
out = F.relu(out)
return out
class Bottleneck(nn.Module):
expansion = 4
def __init__(self, in_planes, planes, stride=1):
super(Bottleneck, self).__init__()
self.conv1 = nn.Conv2d(in_planes, planes, kernel_size=1, bias=False)
self.bn1 = nn.BatchNorm2d(planes)
self.conv2 = nn.Conv2d(planes, planes, kernel_size=3,
stride=stride, padding=1, bias=False)
self.bn2 = nn.BatchNorm2d(planes)
self.conv3 = nn.Conv2d(planes, self.expansion *
planes, kernel_size=1, bias=False)
self.bn3 = nn.BatchNorm2d(self.expansion*planes)
self.shortcut = nn.Sequential()
if stride != 1 or in_planes != self.expansion*planes:
self.shortcut = nn.Sequential(
nn.Conv2d(in_planes, self.expansion*planes,
kernel_size=1, stride=stride, bias=False),
nn.BatchNorm2d(self.expansion*planes)
)
def forward(self, x):
out = F.relu(self.bn1(self.conv1(x)))
out = F.relu(self.bn2(self.conv2(out)))
out = self.bn3(self.conv3(out))
out += self.shortcut(x)
out = F.relu(out)
return out
class ResNet(nn.Module):
def __init__(self, block, num_blocks, num_classes=10):
super(ResNet, self).__init__()
self.in_planes = 64
self.conv1 = nn.Conv2d(3, 64, kernel_size=3,
stride=1, padding=1, bias=False)
self.bn1 = nn.BatchNorm2d(64)
self.layer1 = self._make_layer(block, 64, num_blocks[0], stride=1)
self.layer2 = self._make_layer(block, 128, num_blocks[1], stride=2)
self.layer3 = self._make_layer(block, 256, num_blocks[2], stride=2)
self.layer4 = self._make_layer(block, 512, num_blocks[3], stride=2)
self.linear = nn.Linear(512*block.expansion, num_classes)
def _make_layer(self, block, planes, num_blocks, stride):
strides = [stride] + [1]*(num_blocks-1)
layers = []
for stride in strides:
layers.append(block(self.in_planes, planes, stride))
self.in_planes = planes * block.expansion
return nn.Sequential(*layers)
def forward(self, x):
out = F.relu(self.bn1(self.conv1(x)))
out = self.layer1(out)
out = self.layer2(out)
out = self.layer3(out)
out = self.layer4(out)
out = F.avg_pool2d(out, 4)
out = out.view(out.size(0), -1)
out = self.linear(out)
return out
结果:
ResNet18 :BEST ACC. PERFORMANCE: 90.050%
ResNet50 :BEST ACC. PERFORMANCE: 90.340%
改进:
Identity Mappings in Deep Residual Networks
2016发表了“Identity Mappings in Deep Residual Networks”pdf中表明,通过使用identity mapping来更新残差模块,可以获得更高的准确性。
