雷达无人机系统概览
搭载合成孔径雷达的无人机系统(已升级双GPS冗余系统和GoPro相机)
今年初,我成功研制了搭载于无人机的极化合成孔径雷达(SAR)。通过持续优化软件算法,现已实现图像质量的大幅提升。本文重点介绍三项关键技术突破:
- 创新性混合自动对焦算法,专为无人机SAR系统优化
- 适用于非线性航迹的天线方向图归一化技术
- 极化校准新方法
雷达信号原理

SAR成像几何示意图
当无人机沿航迹飞行时,雷达持续测量波束内目标的距离与相位信息。单次测量无法确定目标的方位角(φ)和俯仰角(θ),相同距离的目标会在信号中重叠。通过多位置测量数据的合成处理,最终可形成雷达图像。
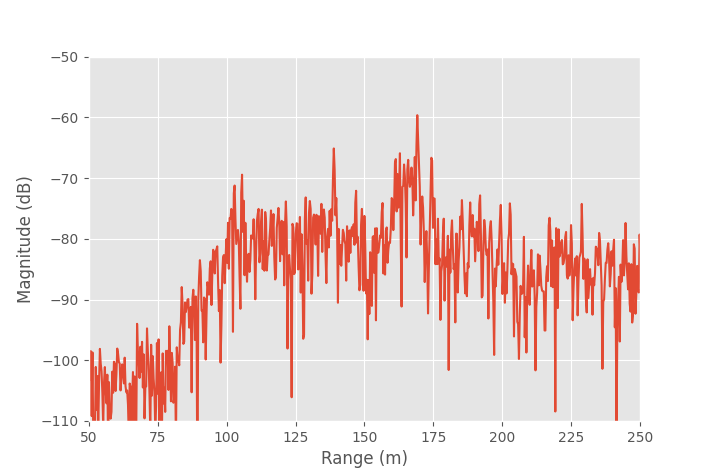
单次距离压缩雷达信号幅度
关键参数解析:
- 距离分辨率:Δr = c/2B(c为光速,B为信号带宽)。例如150MHz带宽对应1米分辨率
- 相位特性:φ = 4πd/λ。6GHz频率下,25mm距离变化即引起360°相位变化
SAR成像核心算法
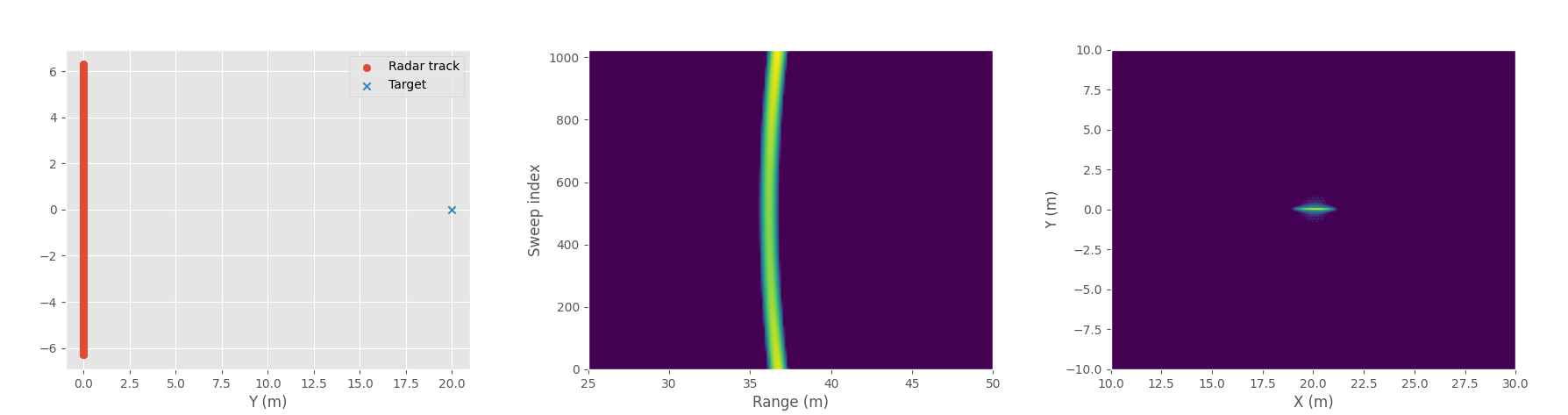
点目标成像示例(左:航迹与目标位置 中:原始数据 右:处理后图像)
匹配滤波算法:
通过构建每个像素点的参考信号(含相位补偿),与实测信号进行共轭相乘并累加。相位匹配时信号增强,失配时相互抵消。数学表达为:
$$
I = \sum_{p \in P} \sum_{n=1}^N S_n(d(p,x_n)) \exp( j \frac{4\pi}{\lambda} d(p,x_n))
$$
定位误差的影响
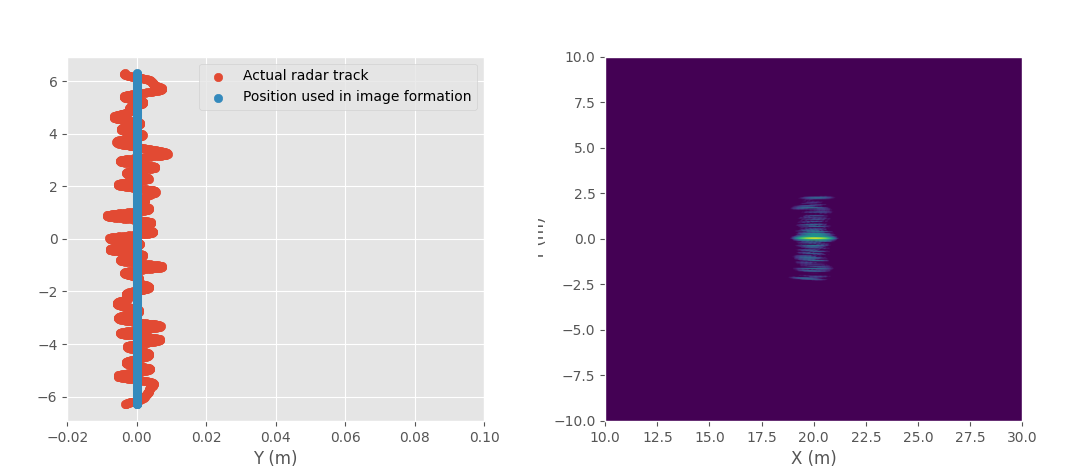
定位误差导致的图像模糊(最大误差仅1cm即引起显著质量下降)
误差类型分析:
- 恒定误差:仅引起固定相位偏移,不影响图像幅度
- 线性误差:导致目标方位向位移
- 复杂误差:形成多焦点模糊效应(如图示场景)
广义相位梯度自动对焦(GPGA)

GPGA算法流程图
技术突破:
- 通过目标相位一致性检测反推定位误差
- 引入低通滤波抑制噪声(窗口尺寸动态调整)
- 多目标加权融合提升估计精度
误差相位计算:
$$
\xi_{n,p} = \exp(-j\frac{4\pi}{\lambda}\Delta r_{n,p} + j\varphi_p)
$$
三维航迹估计

基于子图像分区求解3D定位误差
创新方法:
- 将图像划分为K个子区域
- 各子区独立求解距离误差
- 构建超定方程组求解3D位置误差:
$$
R_n = M_n \Delta x_n
$$
实测效果:
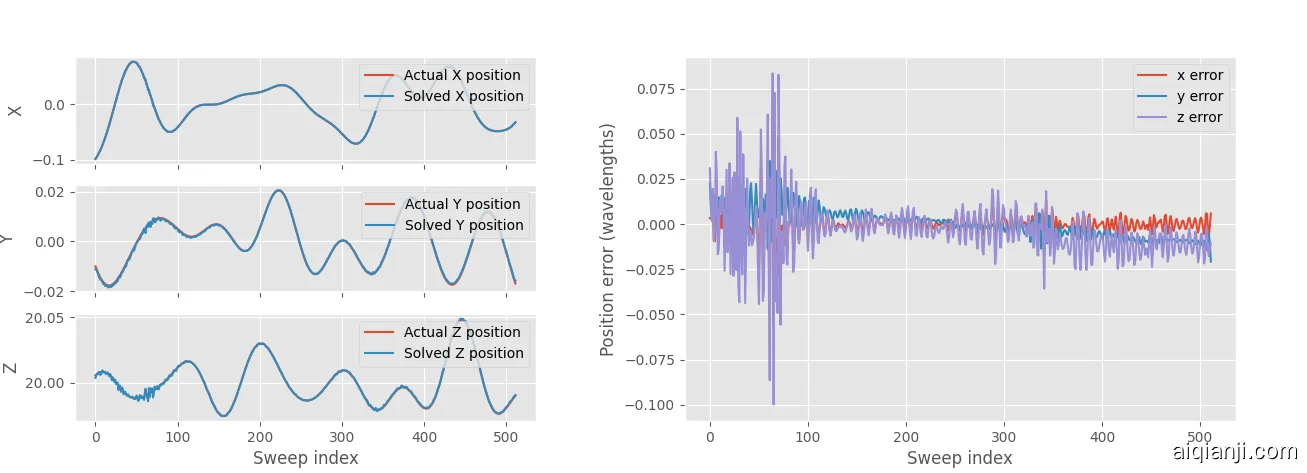
仿真数据误差修正效果(最大误差0.1波长,RMS误差0.025波长)
天线方向图归一化

地面照射区域划分
反射率标准化:
$$
\sigma_0 = \frac{|I|^2}{P_{ref}}
$$
其中参考功率计算:
$$
P_{ref} = C \sum \frac{\sigma_{ref} G_{rx}G_{tx}}{r^4}
$$
归一化效果对比:
经距离和方向图补偿后的图像
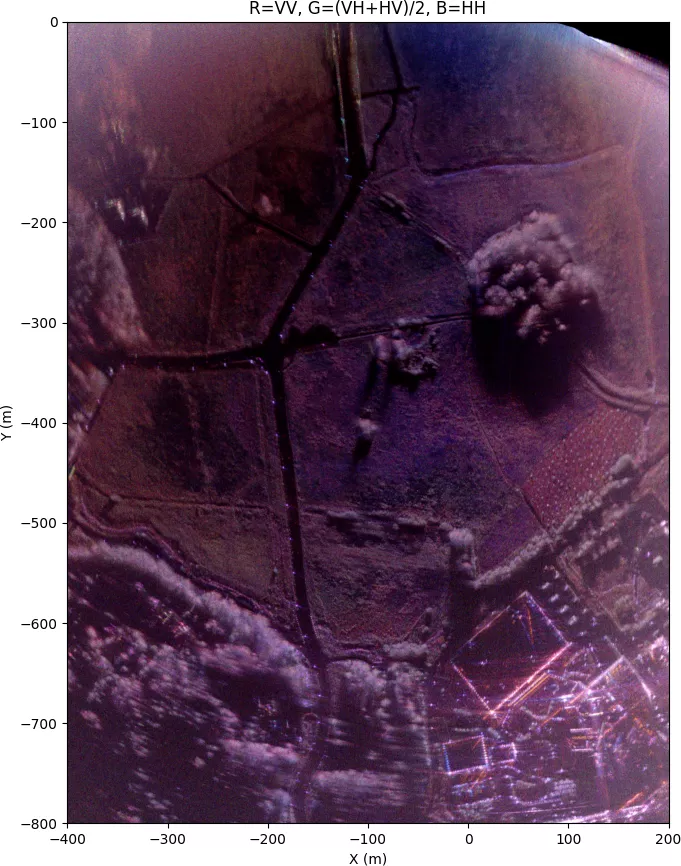
极化校准技术

极化测量误差源分析
校准矩阵模型:
$$
\begin{bmatrix} O_{HH} \ O_{HV} \ O_{VH} \ O_{VV} \end{bmatrix} = \mathbf{M} \begin{bmatrix} S_{HH} \ S_{HV} \ S_{VH} \ S_{VV} \end{bmatrix}
$$
Pauli分解效果:
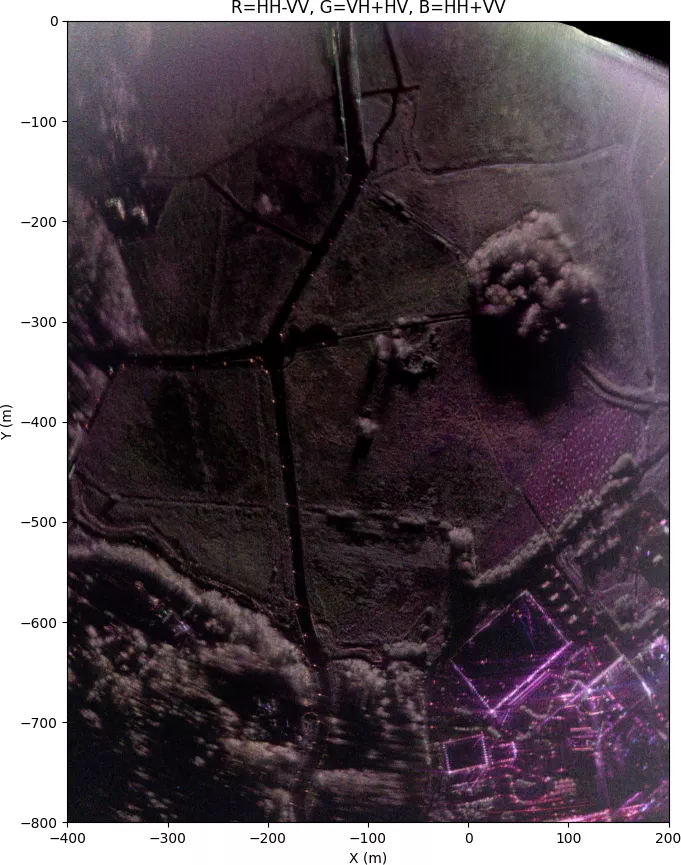
校准后的Pauli分解图像(红:HH+VV 绿:HH-VV 蓝:HV+VH)
动态视频SAR
(浏览器不支持视频标签提示)
通过将长时雷达数据分段处理,实现2倍速播放的SAR视频。每帧含2048次测量,75%帧间重叠保证流畅度。单帧独立对焦后,通过位置预测实现帧间稳定。
城市场景实测
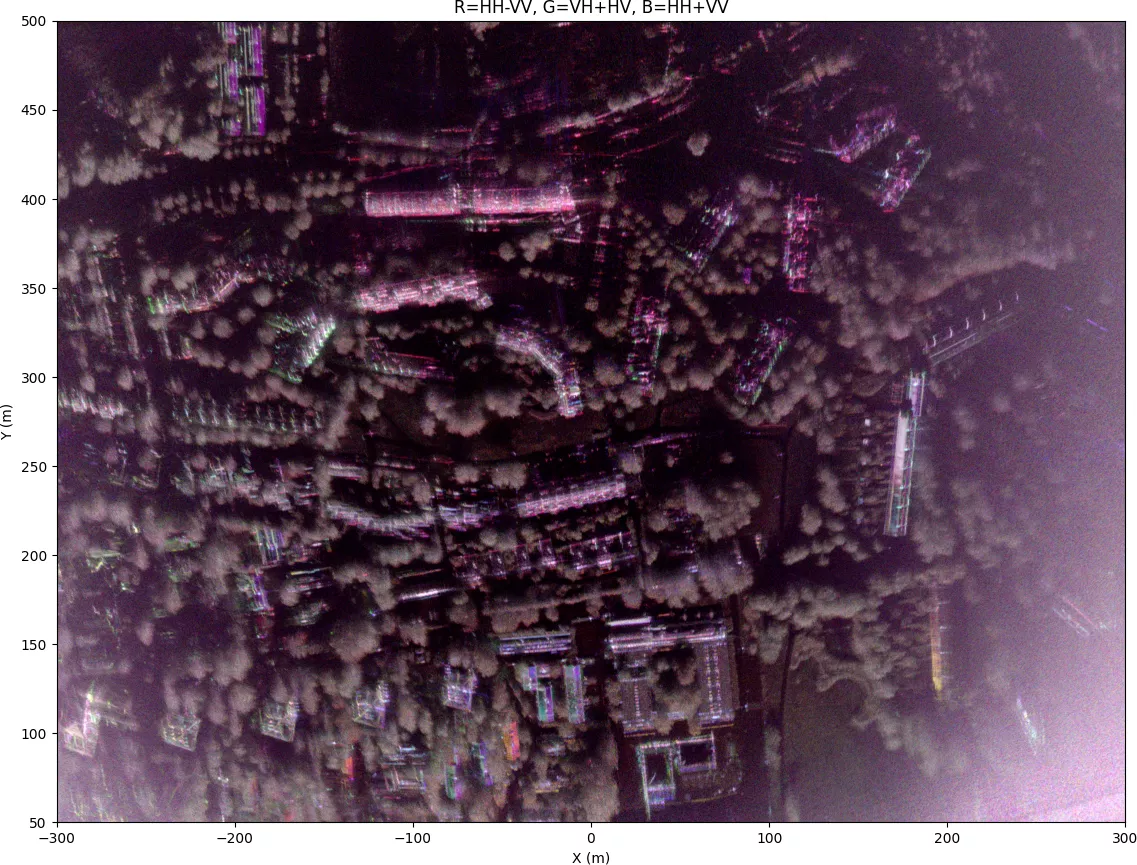
城市场景成像结果(6663×27863像素,处理耗时41秒)
开源与展望
整套算法已开源(GitHub链接),采用GPU加速的快速因子化反投影技术,即使超大尺寸图像也能快速处理。这套可能是目前性价比最高的无人机SAR系统,展现出卓越的工程应用潜力。